

Bild: WAD at CVPR
Vor seinem Sabbatical und dann Ausscheiden in diesem Juli konnte man gelegentlich Videos mit Auftritten von Andrej Karpathy bei Konferenzen oder Twitter-Nachrichten sehen, in denen der Leiter für KI im Autopilot-Team von Tesla über seine Arbeit berichtete. Diese Aufgabe scheint jetzt Ashok Elluswamy zu übernehmen, bei dem laut CEO Elon Musk die Autopilot-Gesamtführung liegt. Auf YouTube veröffentlichte er einen eigenen Auftritt bei einem Workshop zu autonomem Fahren von diesem Juni und auf Twitter Ausschnitte daraus und weitere Erklärungen.
Tesla mit Occupancy Networks
Viele der bei der Fach-Konferenz geschilderten Prinzipien seien in der neuesten Version 10.69 der FSD-Software von Tesla enthalten, schrieb Elluswamy am vergangenen Wochenende auf Twitter, bevor deren Verteilung an die ersten 1000 Beta-Tester begann. CEO Musk hatte sie vorher als bedeutenden Fortschritt beschrieben, der auch die spezielle Bezeichnung 10.69 rechtfertige, aber auch erfordere, dass die Einführung schrittweise erfolgt. Auf Kritik eines der frühen FSD-Tester reagierte der Tesla-Chef diese Woche empfindlich.
Nachdem er das schon für einige Vorjahre in Aussicht gestellt hatte, sagte Musk im August bei der Hauptversammlung, in diesem Jahr werde Tesla das FSD-Problem wirklich lösen, musste dabei allerdings selbst lachen. Elluswamy zeigte sich bei seinem Vortrag im Juni zwar vorsichtiger, indem er keinerlei zeitliche Perspektive gab. Inhaltlich aber ging er auf gewisse Weise sogar über Musks Visionen hinaus, indem er sagte, es werde möglich sein, Autos zu produzieren, die niemals einen Unfall haben müssen.

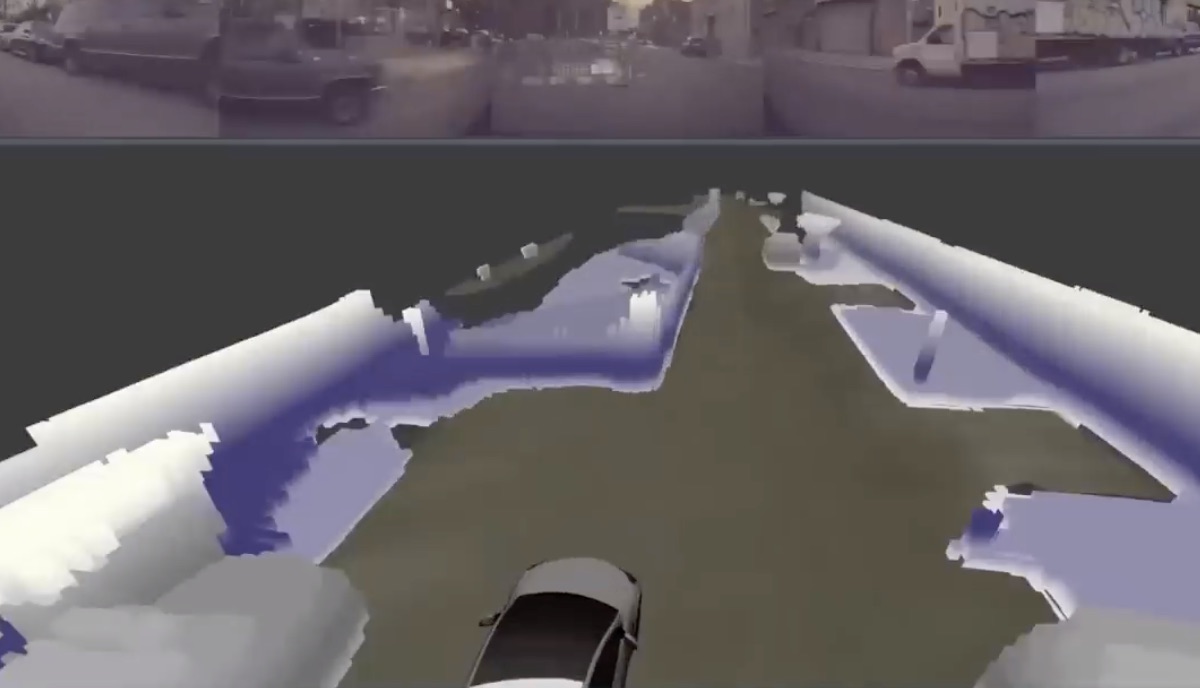
Um das zu erreichen, setzt Tesla auf so genannte Occupancy Networks, wie Elluswamy erklärte: Für jeden 3D-Punkt im Raum um einen Tesla wird mit Hilfe der rundum verbauten Kameras festgestellt, ob er besetzt ist und wohin er sich bewegen dürfte. So ergibt sich eine vollständige Abbildung des Umfelds einschließlich Blick in die Zukunft, die laut dem Autopilot-Chef wenig Speicher und Rechenleistung erfordert. Außerdem versetze sie das Auto in Lage, zu den Seiten zu blicken, auch wenn die zeitweise von stehenden oder bewegten Objekten verdeckt sind.
Autopilot verhindert 40 Park-Unfälle am Tag
Auf diese Weise dürfte Tesla „Chuck’s Turn“ in den Griff bekommen haben. Dass dieses nach einem hartnäckigen Beta-Tester benannte Manöver mit Abbiegen nach links über und auf einen Highway mit der neuesten Beta-Software funktionieren würde, hatte CEO Musk vorher angekündigt. In ersten Tests des Namensgebers mit FSD 10.69 kam das Autopilot-System in den meisten Fällen tatsächlich damit zurecht, aber nicht in allen und nicht perfekt.
Presented some of the recent work from the Tesla Autopilot team at CVPR this year, especially about "Occupancy Networks" – our approach to solve general obstacle detection and using it to enable sophisticated collision avoidance. Full talk here: https://t.co/wpGXlNHaWl (1/12)
— Ashok Elluswamy (@aelluswamy) August 21, 2022
Wie Elluswamy jetzt weiter ausführte, kommt die Berechnung und Simulation des verfügbaren Platzes auch ganz normalen Tesla-Kunden schon zugute. Die stets aktivierten Basis-Funktionen des Autopilot-Systems würden etwa 40 Unfälle pro Tag verhindern, bei denen Fahrer statt auf die Bremse voll auf das Strom-Pedal treten, üblicherweise beim Parken oder Manövrieren, sagte er. Für komplexere Situationen beim Fahren werde aber mehr Intelligenz benötigt. Außerdem muss das Tesla-System dafür schnelle Entscheidungen treffen. Dazu werden laut Elluswamy andere neuronale Netze mit vereinfachten Ergebnissen der Umfeld-Berechnung gefüttert und geben innerhalb von 2 Millionstelsekunden eine Kollisionswahrscheinlichkeit aus.
Wie viel davon schon umgesetzt ist und was noch gelöst werden muss, machte Teslas Autopilot-Leiter weder auf Twitter noch auf YouTube deutlich. Aber er bezeichnete den technischen Fortschritt als „sehr spannend für uns“ und erklärte auf beiden Kanälen, dass Unfälle in Zukunft vollständig verhindert werden könnten, wenn Tesla alle geplanten Schritte richtig umsetzt.