Er sei „extrem zuversichtlich“, im Lauf des kommenden Jahres technisch vollständige Autonomie-Funktionen erreichen und an die Tesla-Kunden ausspielen zu können, sagte CEO Elon Musk vor kurzem bei einer Auszeichung durch den Springer-Verlag in Berlin. Einen großen Schritt in Richtung dieses Ziels hat Tesla Mitte Oktober mit dem Start der ersten Beta-Tests einer grundlegend neuen 4D-Version seiner Autopilot-Software gemacht. Die immer noch wenigen ausgewählten Tester in Nordamerika berichten weiter intensiv von ihren Erfahrungen damit – und sie fallen weiter beeindruckend aus.
Tesla weicht sauber einem Reh aus
„Teslas FSD-Beta umfährt nachts Reh auf Nebenstraße / Fährt sogar ohne Scheinwerfer“ lautet der Titel des neuesten Test-Videos von Dirty Tesla auf YouTube, und damit ist der Inhalt schon treffend beschrieben. Denn beides funktioniert tatsächlich bemerkenswert gut.
Ob die neuronalen Netze, die zusammen die Funktionen für autonomes Fahren bei Tesla (Full Self-Driving oder eben kurz FSD) bereitstellen, das Tier auch hätten genau erkennen können, ist nicht bekannt. Aber bei der Fahrt auf einer Nebenstraße ohne Beleuchtung wird auf dem Bildschirm deutlich ein Quader am linken Rand der Straße angezeigt, als im realen Bild ein Reh dort auftaucht; als es sich in den Fahrweg bewegt, plant das System einen Weg darum herum, wie auf dem Tesla-Display zu sehen ist. Zuerst will der Autopilot rechts an dem Quader vorbei, dessen Position und Bewegung korrekt angezeigt werden. Als das Reh die Straße weiter überquert, wechselt der geplante Weg auf eine Links-Umfahrung – und kurz darauf lenkt das Elektroauto kurz in diese Richtung und dann wieder zurück auf seine Bahn.
Dirty Tesla, der das Geschehen nach seinen Angaben nur nebenbei und ungeplant gefilmt hat, zeigt sich sehr erfreut über diese Leistung des 4D-Autopiloten. „Er hat einfach gebremst und ist ausgewichen“, ruft er in dem Video. Auf dem weiteren Weg begegnen Mensch und Maschine noch ein paar Rehe, die jeweils angezeigt werden, aber weder automatische Reaktionen noch ein Eingreifen erforderlich machen.
Autopilot findet Weg im Dunklen
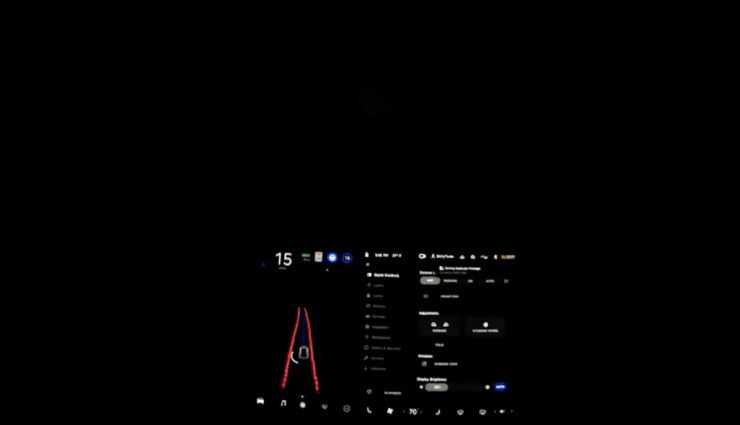
Die zweite Aktion des Abends ist nicht weniger interessant, aber nicht spontan, sondern ein geplanter Test. Dafür steht eine private Straße zur Verfügung, wie der YouTuber betont. Beim Fahren mit aktivierter FSD-Beta schaltet er darauf die Scheinwerfer seines Tesla aus. Zunächst wird das Umfeld noch etwas vom Tagfahrlicht beleuchtet, aber auch dieses deaktiviert Dirty Tesla. Und dann ist zumindest auf den von ihm gefilmten Bildschirmen in seinem Elektroauto absolut nichts mehr vom Umfeld zu sehen. Das Autopilot-Display aber zeigt weiter den Verlauf der schmalen Straße an, wie man ihn noch erahnen kann, wie in der Beta-Software üblich mit den Fahrbahnrändern in leuchtend Rot und dem geplanten Weg in Blau dazwischen.
Auf die Idee, sich mangels Sicht zu deaktivieren, kommt das System offenbar nicht, wie an dem weiter blau hinterlegten Lenkrad-Symbol zu erkennen ist; stattdessen fährt der Tesla mit 15 Meilen pro Stunde auf der schmalem Nebenstraße weiter, wie das Display ebenfalls anzeigt. Der Test endet, als dem Fahrer aus einiger Entfernung das Auto seines Nachbarn entgegenkommt, weshalb er das Licht wieder einschaltet. Wie man in diesem Moment sieht, befindet sich das Auto immer noch gut zentriert in der Fahrbahn.